 |
|
|
|
|
 |
 |
|
|
(第1フェーズ:平成15年~18年)
壁面走行技術の中でも,滑らかな面への吸着しながら走行する技術を用いて,窓面を清掃するロボットの実現を目指した研究.姿勢制御を行うことで窓面を効率よく走行することと,外側ボディーと走行機構が自在に回転することで窓清掃に対して有効な走行メカニズムを実現した.
(第2フェーズ:平成19年~)
吸盤と壁面の間に液体を介在させることで,真空吸着に対するシール性の向上と吸着走行のための摩擦力の低下を狙った技術開発を行う. |
|
|
|
|
|
担当スタッフ |
三宅徹,吉村基,富野達也,有馬暢聰,高畑陽一,庄司龍,中原友里 |
|
|
|
|
|
トピックス |
平成19年~NEDO (新エネルギー・産業技術総合開発機構)産業技術研究助成採択(課題名:液体潤滑を用いたユビキタス壁面移動ロボットの開発)
平成16年~17年NEDO(新エネルギー・産業技術総合開発機構)実用化ロボット開発プロジェクト(プロトタイプ開発支援)対象事業
2005年日本国際博覧会(愛・地球博)プロトタイプロボット展出展(2005年6月9日~19日)
未来フェスタかがわ出展(2005年9月)
ロボットフェスティバルin銀座出展(2006年3月) |
|
|
|
|
|
 |
 |
|
|
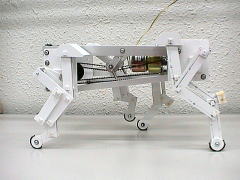
従来の4脚移動ロボットでは,各関節にモータを配置していたが,現在のDCモータを主流とするシステムでは,モータの出力/重量比が小さいため,十分な動作をとることができていない.そのため,移動にのみ着眼し,足先軌道を生成することを目的にリンク機構を利用することでモータ数を減少させ,脚駆動のタイミングに位相差を与えることで4脚での移動を実現した. |
|
|
|
|
|
担当スタッフ |
森田和郎 |
|
|
|
|
|
トピックス |
平成16年香川大学萌芽研究助成対象研究
平成17年香川大学萌芽研究助成対象研究 |
|
|
|
|
 |
|
|
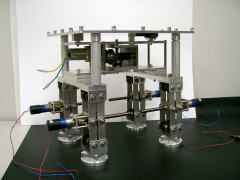
4脚移動ロボットの実用性を考えた場合,荷物の運搬が重要な役割となる.従来の関節にDCモータを配置した機構の場合,ペイロードが小さく,姿勢の保持にもエネルギーが必要となるなど搬送用途には適していない.
本研究では,脚部の伸縮機構にジャッキ機構を採用し,歩行動作にはクロール歩容を取り入れることで,重量物の搬送が可能なロボットの構造を提案している. |
 |
|
|
|
|
|
担当スタッフ |
黒井聖史,小林祐紀,池田充 |
|
|
|
|
|
|
|
|
 |
|
|
エレクトロニクス,MEMS技術の発達などから,高密度実装,高機能化が進む中で,実装されるデバイスを繋ぐケーブルに 対しても,細線化,対電磁ノイズなどの要求があがっている.この研究ではそれらの解決のため,シールドを薄膜で形成することで細線化を実現し,平成16年 度においては,直径100μmの極細同軸ケーブルを実現した. |
 |
|
|
|
|
|
担当スタッフ |
湯川公人,割石健 |
|
|
|
|
|
|
トピックス |
平成15年~16年 経済産業省地域新生コンソーシアム対象事業
平成17年 経済産業省産業技術開発助成対象事業 |
|
|
|
|
|
|
|
|
|
|